Degli operatori vettoriali e differenziali il rotore o come direbbero gli anglosassoni: curl, è forse quello più sofisticato di tutti , perche la sua formulazione risulta abbastanza complicata da memorizzare in un primo momento, tantè che i matematici o i fisici si sono inventati un trucchetto mnemonico del determinante simbolico per ricordare o meglio (ricavarsi) la formula del rotore!
Consideriamo un campo vettoriale \( F : {\mathbb R}^3 \rightarrow {\mathbb R}^3 \). Il rotore di \( F \) è un nuovo campo vettoriale che si ottiene a partire da \( F \) le cui componenti si possono ricavare attraverso la formula del determinante simbolico:
Il determinante simbolico è definito come segue: $$ \color{#007080}{{\large \nabla \times F = \left| \begin{matrix} \hat{i} & \hat{j} & \hat{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ F_x & F_y & F_z \\ \end{matrix} \right| = rotF }}$$ $$ \color{#007080}{{\large \nabla \times F = \left| \begin{matrix} \hat{i} & \hat{j} & \hat{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ F_x & F_y & F_z \\ \end{matrix} \right| = rotF }}$$ $$ \color{#007080}{{\large \nabla \times F = \left| \begin{matrix} \hat{i} & \hat{j} & \hat{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ F_x & F_y & F_z \\ \end{matrix} \right| }}$$ $$ \downarrow $$ $$ = {\large rotF }$$
Per ricavare la formula del rotore in coordinate cartesiane, bisogna sviluppare il determinante rispetto alla prima riga secondo l'algoritmo di Laplace. Infatti impiegando la notazione con l'uso di nabla, il rotore può essere interpretato(con le dovute convenzioni) come il prodotto vettoriale di nabla con \( F \). Svolgendo i passaggi abbiamo che:
Come vedremo, successivamente è possibile esprimere il rotore in altri sistemi di coordinate (cilindriche, polari ...) la definizione data sopra fa riferimento alle coordinate cartesiane euclidee rettangolari; (quelle più semplici ca comprendere all'inizio). Diamo ora un'interpretazione fisica della formula del rotore; in seguito daremo la definizione analitica del rotore.
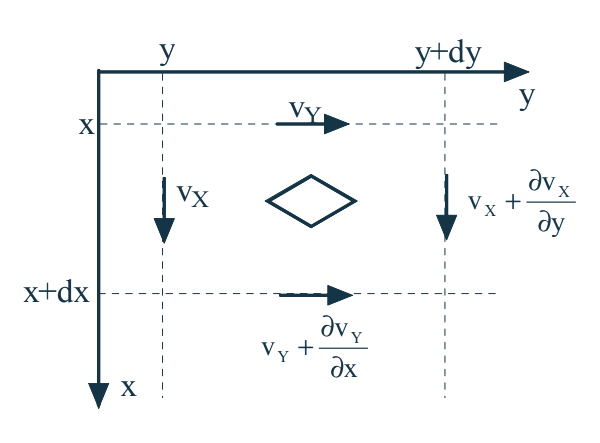
Interpretazione fisica
Per capire ciò che descrive fisicamente la formula del rotore, immaginiamo una foglia posata su di un flusso d'acqua, la cui velocità delle particelle d'acqua è descritta dal campo vettoriale delle velocità \( V \).