La fisica, si sà, è densa di matematica... e quando la matematica si apre ai nostri occhi ed alla nostra mente, lo fà attraverso la geometria. Tutto ciò che percepiamo, tutto ciò che immaginiamo, tutto ciò che costruiamo... è il frutto della nostra psiche e della fantasia del nostro straordinario cervello con le sue migliaia di interconnessioni neuronali. La questione se la matematica è il frutto della mente umana oppure è qualcosa di assoluto da scoprire è la chiave di tutto, del modo in cui la mente costruisce il mondo intorno a se. Ma come possiamo realizzare tutto questo? Se ci pensiamo, un momento, ci accorgiamo che la questione è legata in buona parte alla nostra percezione delle cose, i nostri sensi, ci permettono di realizzare un'immagine mentale del mondo intorno a noi, che, se da una parte sembra essere abbastanza fedele alla realtà, molto spesso ci conduce a delle conclusioni errate..
Su questa scia... vedremo in questa breve discussione alcuni degli oggetti geometrici mai ideati dall'uomo per la descrizione fisica e matematica di fenomeni naturali, io li chiamo i mattoni fondamentali della fisica... e vi assicuro che dopo questa chiacchierata sarete d'accordo con me.
$$ \diamond $$Scalari e campi scalari
Iniziamo dando i numeri... anzi gli scalari. In fisica esistono grandezze. Le grandezze, sono quantità che possono essere descritte e misurate. Le più semplici grandezze possono essere descritte da un sol valore numerico rispetto ad una unità di misura. Come esempio pensate alla temperatura, alla pressione di un gas, alla massa ecc. Se conosco la temperatura in un determinato punto di una stanza, l'informazione sufficiente a descrivere il fenomeno: (temperatura in un punto di una stanza) è descritta dal solo valore numerico di temperatura (es: \( 55 °C \) ). Tutto quì! Un sol valore, nulla di più nulla di meno. Questi numerini i fisici li chiamano scalari e rappresentano il più semplice oggetto per descrivere una grandezza fisica. In genere queste grandezze, sono variabili nel tempo e nello spazio; ad esempio una temperatura cambia di ora in ora, oppure si mantiene costante in un dato intervallo di tempo. La pressione in un'area, può variare di punto in punto ecc. Nasce così la necessità di tener conto di queste variazioni delle grandezze, e come vedremo la soluzione ci viene dalla matematica, in particolare dall'analisi attraverso il concetto di funzione.
Immaginiamo di posizionarci in un sistema di riferimento. Un sistema di riferimento, per chi non lo sapesse è una sorta di metro misuratore in uno spazio. Ci serve per calcolare distanze, posizioni ecc... Se consideriamo un dominio dello spazio, ossia un'area, in cui andiamo a misurare in ogni punto la nostra grandezza temperatura, possiamo costrutire una funzione che associa ad ogni punto - individuato dalle coordinate nel riferimento \( (x, y, z) \), il valore di temperatura nel punto stesso: \( \mathrm{T = T(x, y, z)} \). Abbiamo costruito così, un campo scalare.
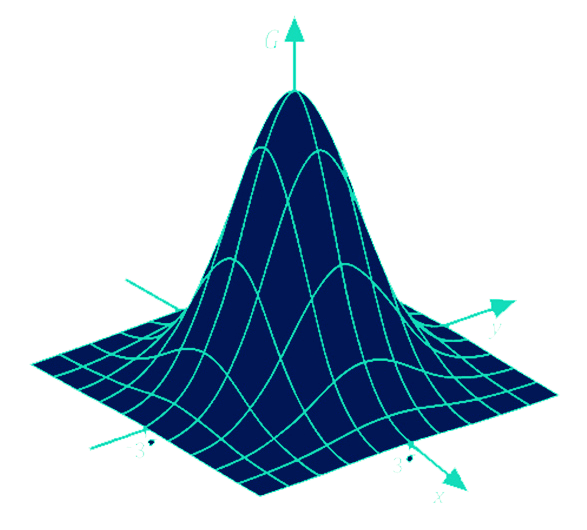
$$ {\large T = T\begin{pmatrix}x \\ y \\ z\end{pmatrix} \in \mathbb R } $$Il nome campo, sta a significare che nello spazio c'è una zona, "un campo", per l'appunto che descrive (mappa) il comportamento della grandezza. Un campo scalare dipendente dallo spazio è sostanzialmente una funzione reale o complessa a più variabili che descrive una grandezza scalare. Nella figura, ad esempio ho riportato un campo scalare a due variabili. Per la sua semplicità un campo a due variabili si può graficare nella terza dimensione \( z = \mathrm T(x, y) \), mentre per dimensioni maggiori la cosa inizia a diventare meno visibile.
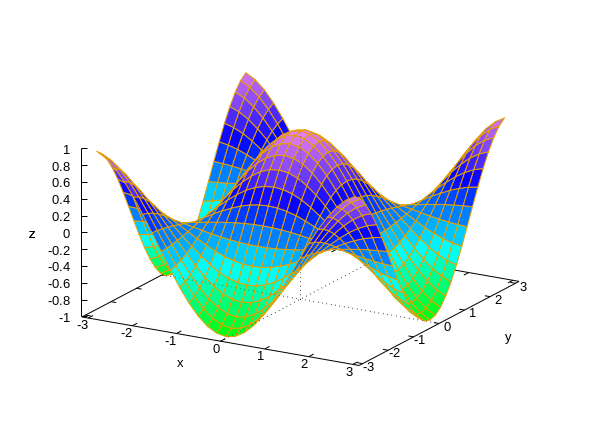
FIG - 0.1: [ un campo scalare reale ]
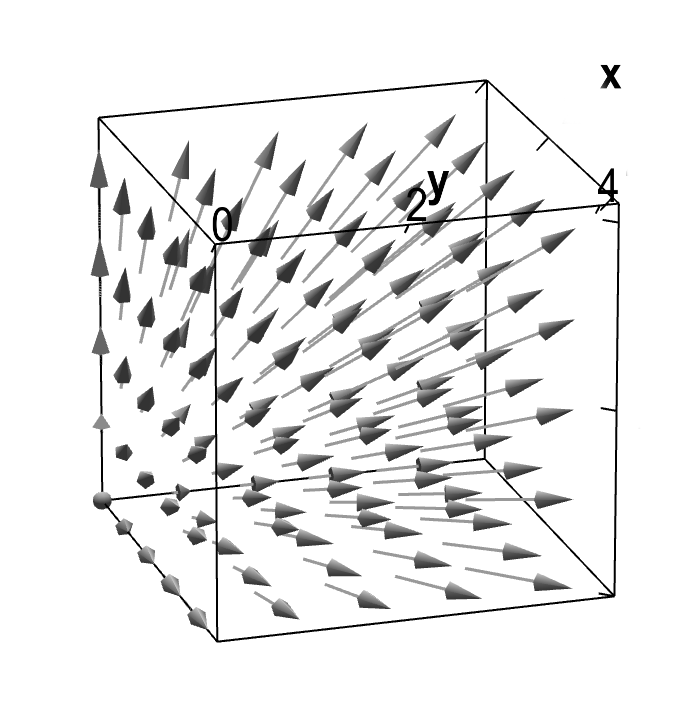
FIG - 0.2: [ un campo vettoriale reale ]
Vettori e campi vettoriali
Il bello della fisica è che le grandezze, non sono tutte uguali. E per questo i fisici ed i matematici, si sono inventati degli enti geometrici per ogni tipo di grandezza da descrivere. Ad esempio se considero una forza oppure una velocità, oppure ancora, una posizione, non posso dire ad esempio che, su un oggetto imprimo una forza pari a \( 6N\) oppure che sto andando a \( 100 km/h\). Se questo per voi ha un senso comune, fisicamente non sto dicendo alcunché, in quanto necessito di altre informazioni. Ad esempio, nel caso della velocità, oltre al valore stesso della velocità: \( 100 Km/h\), devo dire anche in che direzione sto andando (es: Milano-Roma) ed in che verso (es: da Milano a Roma oppure da Roma a Milano).
Ebbene, tutte queste informazioni, posso raggrupparle a formare un insieme ordinato di numeri che i fisici chiamano vettore. Il modo di estrarre, poi da questi numeri, la direzione, il verso ecc, si ottiene operando delle semplici operazioni sui numeri stessi. Un vettore è sostanzialmente, un gruppo di più scalari o altri oggetti più complessi (componenti), ordinati, nel senso che non è un insieme ma una ennupla. Graficamente, un vettore si può rappresentare con una freccetta \( \vec{} \), ma è solo un simbolismo. in generale un vettore si esprime attraverso le sue componenti come mostrato di seguito.
Dato un vettore qualunque, è possibile definire, o meglio calcolare la lunghezza del vettore o anche detta norma nel seguente modo:
Consideriamo, di nuovo, un dominio dello spazio. Per ogni punto dello spazio, associamo un vettore. Questo significa, che ogni componente è una funzione del punto nello spazio.
Un oggetto di questo tipo si chiama campo vettoriale. I campi vettoriali, sono alla base di tutta la fisica. Ad esempio, tutta la teoria dell'elettromagnetismo di Maxwell si basa sul concetto di campo. Un campo rappresenta una "perturbazione" di una zona dello spazio a seguito di un fenomeno tipo la presenza di un magnete o di una corrente o addirittura di una massa che "genera", per l'appunto una "modificazione o interazione" percepibile nelle vicinanze del fenomeno stesso alla quale gli si denota l'appellativo di campo. Sui campi ci sarebbe da discutere parecchio... quì diamo solo un cenno minimo ad essi... per approfondimenti, comunque, prossimamente aprirò un corso di Analisi Due in riferimento al quale vi daro il relativo link.
Sui vettori, e sui campi di vettori (che sono la versione variabile dei vattori statici), si possono operare, come per gli scalari, tutte le operazioni di somma, prodotto, divisione ecc. Inoltre valgono tantissime altre proprietà ed operazioni nuove, che per gli scalari non valgono. Il motivo dipende dal fatto che i vettori, sono oggetti più sofisticati e quindi possiamo definire su essi operazioni altrettanto sofisticate.
Molte di queste operazioni, quasi tutte, vengono trattate nel corso di analisi 2. Nelle figure in basso ho riportato alcune raffigurazioni di alcuni dei principali teoremi sui campi vettoriali.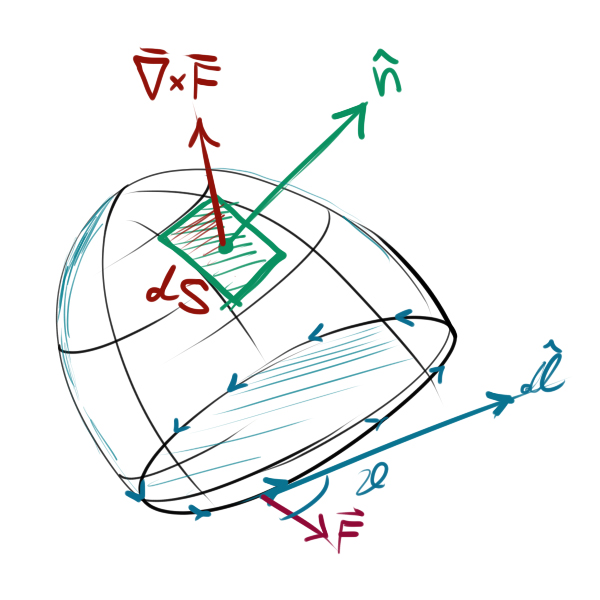
Teorema di Stokes $$ \oint_\gamma \langle \mathrm F, d\gamma \rangle = \int_\Sigma \langle \mathrm{rotF}, \hat{n}dS \rangle $$
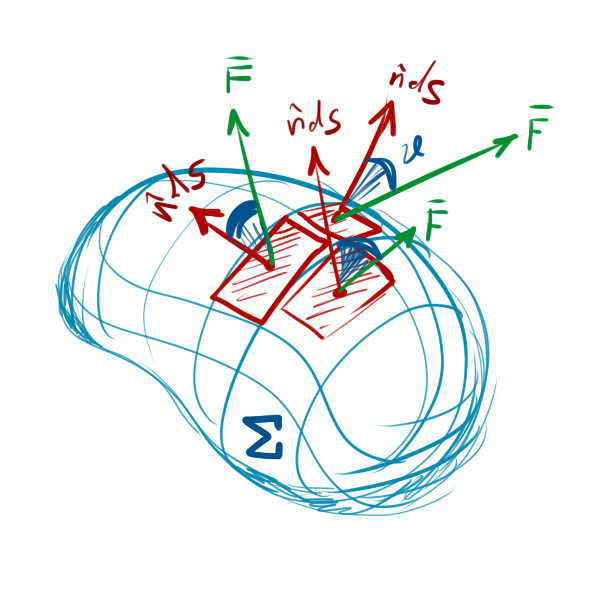
Teorema di Gauss $$ \oint_\Sigma \langle \mathrm F, \hat{n}dS \rangle = \int_\Omega \mathrm{divF} d\Omega $$
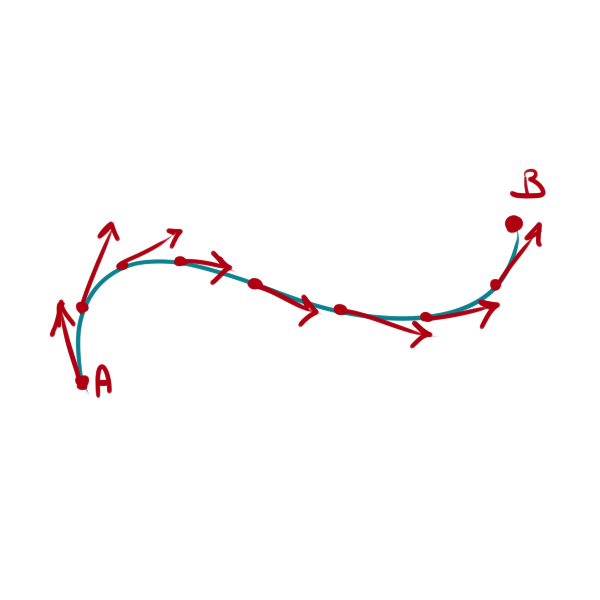
Integrale di linea $$ \int_\gamma d\gamma = \int_a^b{\sum_{i=1}^n{\mathrm V_i \overset{\Large \cdot}{x_i}}} dt $$
Il significato di questi teoremi non verrà spiegato in questo articolo, altrimenti più che un semplice articolo, rischiamo scrivere un trattato di analisi, per questo, come già detto vi rimando al mio corso di analisi 2. Ebbene, questi teoremi esprimono delle relazioni che coinvolgono spazio e campi vettoriali e sono di estrema importanza sia in elettrodinamica che nella teoria dei campi. Il primo a sinistra è il Teorema di Stokes, che mette in relazione il flusso del rotore attraverso una superficie con la circuitazione sul bordo della superficie stessa. Viene usato principalmente nella definizione dei fenomeni elettromagnetici nelle Equazioni di Maxwell di cui ne parleremo in un'altro articolo. Il secondo è il Teorema di Gauss della divergenza valido per le superfici chiuse (gaussiane) ed il terzo non è un teorema, ma semplicemente è la definizione di un oggetto chiamato Integrale di linea. Tutte queste bellissime relazioni sono conseguenza dei campi vettoriali e, ripeto, per ora non entrerò nel vivo dei dettagli tecnici, ma vi prometto che ne parlerò prossimamente... per ora godiamoci questa brevissima introduzione e passiamo al prossimo oggetto di studio.
$$ \diamond $$Matrici
Un vettore, abbiamo visto, è un insieme ordinato di elementi. Questo significa che è possibile identificare ogni elemento del vettore con \( 1\) indice, ad esempio un vettore \( v\) ad \( n \) dimensioni ha un indice \( i\) che varia da: \( 1...n \). In questo modo acquista particolare importanza la posizione degli elementi ed ogni elemento del vettore può essere individuato dell'indice es: il primo elemento si indica con \( v_1\), il terzo con \( v_3\) e così via...
Provando ad estendere questa idea a più dimensioni, vengono fuori degli oggetti più complessi, che nel caso a \( 2\) dimensioni si chiamano matrici. Una matrice è un vettore \( \mathrm B\)-dimensionale, nel senso che per individuare un elemento della matrice necessito di \( 2\) indici. E' possibile rappresentare una matrice come una tabella a righe e colonne e definire un indice di riga \(i\) ed un indice di colonna \( j\), in questo modo un qualunque elemento di una matrice \( \mathrm A\) verrà indicato mettendo a pedice entrabi gli indici \( i\) e \( j\) come riportato di seguito:
L'algebra delle matrici è carica di definizioni ed applicazioni. La potenza di questo strumento sta nel fatto che una matrice può essere data in pasto ad un elaboratore elettronico, il quale, per il tramite di uno o più algoritmi scritti in un linguaggio di programmazione di potenza come ad esempio il C++, può computare una miriade di calcoli e risolvere ad esempio equazioni differenziali altrimenti irrisolvibili analiticamente. In robotica ad esempio si fa largo uso delle cosiddette matrici di rotazione, che esprimono una rotazione intorno ad un dato asse, ad esempio nell'ambito degli angoli di Eulero abbiamo le tre matrici elementari di rotazione. tutte le altre si ottengono a partire da prodotti di matrici.
Tensori e campi tensoriali
Non tutte le grandezze fisiche sono vettoriali. Non è possibile ad esempio descrivere con un vettore o una matrice le deformazioni di un corpo soggetto a forze, oppure, addirittura la curvatura dello spaziotempo della relatività generale causata dalla presenza di masse. La realtà e veramente complessa, ma la mente lo è di più! Il dono di astrarre le cose sembra essere innato nella natura dell'uomo.
Non ci accontentiamo mai delle nostre idee, delle strutture matematiche forse perchè esse non ci soddisfano appieno o perchè non sono abbastanza raffinate da descrivere le più recondite caratteristiche dei fenomeni... allora ci disfiamo delle nostre belle matrici, dei nostri bravi vettori e ci inventiamo oggetti ad hoc adatti ia nostri scopi, è il caso di Einstein, il quale fece riferimento ad una matematica "assoluta", suggeritagli dal suo amico e collega matematico, Marcel Grossmann quando era alle prese con la geometria riemanniana nella sua RG. La questione della generalizzazione degli enti matematici risale alla notte dei tempi. Per questo ora vi parlo brevemente degli oggetti più astratti e raffinati che generalizzano vettori, matrici in un'algebra "ad alto livelo".... nel senso che sia vettori che matrici sono casi particolari di questi enti dalle mille sfaccettature chiamati Tensori.
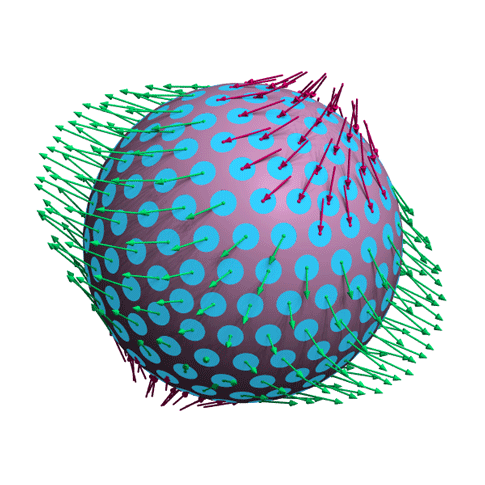
FIG - 0.3: [ un modello di campo di tensore di stress in un 3-spazio vettoriale ]
Abbiamo visto che un vettore o una matrice sono un insieme ordinato di elementi. E fin quì tutto ok. Ebbene, c'è una cosa che non abbiamo detto, e che forse è "la proprietà più importante di tutte che definisce realmente che cos'è un vettore". Questa proprietà fa riferimento a come le coordinate del vettore cambiano da un sistema all'altro. Un vettore non è semplicemente un insieme di numeri ordinato, ma più precisamente un insieme ordinato di numeri, con l'aggiunta che esso si comporti in un certo modo quando si passa da un sistema di riferimento ad un altro.
Un tensore è un gruppo di numeri o di oggetti più complessi, che, rispetto ad un vettore, generalizza molti comportamenti legati alle trasformazioni di coordinate e descrive (ingloba) come casi particolari: prodotti scalari, covettori, forme bilineari, endomorfismi ecc ecc... possiamo paragonarlo ad una sorta di "unificatore di enti matematici" perciò esso rappresenta un oggetto stremamente potente da permetterci di descrivere una "fisica assoluta". Sinteticamente un tensore viene rappresentato mediante la seguente notazione ad indici: .
$${\LARGE T_{ij}} $$ Questi indici, possono assumere i valori: \( 1, 2, 3 \). In tal modo abbiamo \( 3 \cdot 3 = 9\) elementi, che possiamo raggruppare ordinatamente in una tabella: $$ T_{ij} = \begin{Vmatrix} T_{11} & T_{12} & T_{13} \\ T_{21} & T_{22} & T_{23} \\ T_{31} & T_{32} & T_{33} \\ \end{Vmatrix} $$ Sui tensori, c'è molto da dire... quì scalfiremo solo una minima parte dell'argomento, che troverete in un corso di geometria superiore che è in fase di sviluppo e che successivamente vi fornirò. Un parametro importante che caratterizza un tensore è l'ordine, ossia il numero di indici. Nell'esempio appena descritto, l'ordine è pari a \( 2\). In generale possiamo avere un numero qualunque di indici: per esempio, osservate le seguenti scritture. $$ {\LARGE T_{ij}^{k}} \hspace{1cm} {\LARGE T_{ab}^{cde}} \hspace{1cm} {\LARGE T_{j}^{m}} $$ Nelle scritture, notate la presenza degli indici bassi e degli indici alti: quelli bassi si chiamano indici covarianti mentre quelli in alto indici controvarianti. Non confondete gli indici con le potenze, la notazione seppur simile e confusionale, si è rivelata di estrema potenza nel calcolo tensoriale. Le scritture rappresentano rispettivamente, dalla sinistra: tensori di ordine 3, di ordine 5 e tensori di ordine 2. Possiamo rivedere, a questo punto, tutto con gli occhi del calcolo tensoriale. In questo modo uno scalare può essere visto come un tensore di ordine \( 0\), un vettore, come un tensore di ordine \( 1\) ed una matrice come un tensore di ordine \( 2\)... e così via, per oggetti superiori si usa il nome tensore di ordine n.
Come visto per i vettori, se in un dato dominio spaziale, associamo ad ogni punto un tensore, abbiamo costruito un campo tensoriale, oggetto estremamente complesso, che descrive mutamenti e trasformazioni invarianti - spaziali in un riferimento. Ad esempio nello spazio tridimensionale, possiamo definire un campo tensoriale di ordine \( 5\), nel modo seguente: $$ {\Large T_{ijk}^{rs}\Bigl( x, y, x\Bigr) } $$
Notate come con questa semplice scrittura concisa, riusciamo a descrivere ben \( 3^5 = 243 \) funzioni di tre variabili! Un risultato stupefacente!A questo punto, credo di aver detto abbastanza per una semplice discussione sull'argomento, direi estremamente vasto da conglobare in un semplice articolo. Tuttavia, riprenderemo presto l'argomento più volte, in molte occasioni... anche perchè lo stesso Albert Einstein, fece abbondante uso di questo "calcolo tensoriale-differenziale assoluto" direttamente dai lavori degli italiani Tullio Levi Civita e Gregorio Ricci Curbastro per la sua Teoria della Relatività. Alla prossima! $$ \sqrt{|Fine|^2} $$